



Discover my work at the intersection of AI development and practical engineering, delivering impactful ML and AI solutions from research to deployment.
About Me
🧠 I'm an AI/ML Engineer who builds intelligent systems from the chip up. Thanks to my background in FPGA/ASIC design, I have a unique knack for optimizing AI from the ground floor, ensuring solutions are not just smart, but incredibly efficient.
🚁 For my master's thesis, I had a blast teaching a drone to think for itself. I developed a Reinforcement Learning framework for UAVs to navigate and avoid collisions in chaotic, unpredictable environments—like those in earthquake-struck areas.
💪 Basically, I build autonomous systems that are resilient enough to handle real-world chaos.
My Work
Intern-MLE, Khiladi
Technical Support Engineer, Motive
Portfolio
Enhanced multi-label classification models using XGBoost and Random Forest, achieving a 25% improvement in prediction accuracy for bowling error detection through rigorous 10-fold cross-validation.
Implemented a containerized FastAPI-based API deployment using Python to reduce inference latency by 30% and enable real-time predictions across multiple client applications.
Streamlined the ML model deployment pipeline by establishing CI/CD workflows on Google Cloud Build, decreasing deployment time by 40% and enhancing production scalability.
Analyzed performance data using Grafana and DataDog, identifying critical trends and resolving 85% of recurring issues to enhance user experience and reduce support ticket volume by 40%.
Coordinated with cross-functional teams to alert stakeholders on emerging product health trends, leading to proactive adjustments that improved system reliability by 25% and boosted customer satisfaction
My Projects
RL-Based Collision Avoidance for UAVs

Developed and implemented a Reinforcement Learning (RL) framework that enhanced the navigation capabilities of UAVs in earthquake-stricken environments, achieving a 40% reduction in collision rates during simulated missions within a complex terrain.
Created an advanced Unity 3D simulation featuring over 50 static and dynamic obstacles, which enabled real-time testing of UAV navigational strategies; this simulation contributed to the successful training of an RL agent capable of adapting to diverse environmental challenges with a 85% success rate.
Grand Prix 2025 Prediction Model
Achieved 82.4% accuracy in predicting Formula 1 race winners using XGBoost and comprehensive feature engineering (driver form, track history, grid position, DNF rates)
Built end-to-end ML pipeline with Kaggle data integration, temporal cross-validation, and automated model evaluation using Python, pandas, and scikit-learn
Delivered production-ready solution with CLI interface, Windows-compatible setup, and detailed performance metrics (log loss: 0.095, Brier score: 0.025)
Cost-Effective and Precise SMDs for PCBs
Engineered a cost-efficient Pick-and-Place machine prototype utilizing machine learning principles, reducing production costs by 40% while maintaining industry-standard accuracy levels of 99.8%, enabling broader market accessibility.
Implemented advanced automation algorithms that increased assembly throughput by 35%, decreasing component placement time from an average of 12 seconds to under 8 seconds per device, significantly boosting manufacturing efficiency.
Developed a scalable design framework for SMD placement on PCBs, enhancing precision in component alignment from ±0.05mm to ±0.01mm, which contributed to a 20% reduction in defect rates during initial testing phases.
RAG-Powered Conversational AI Agent
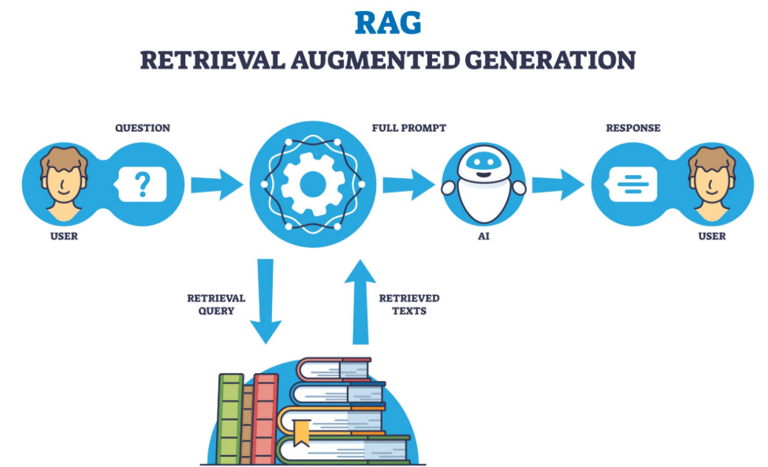
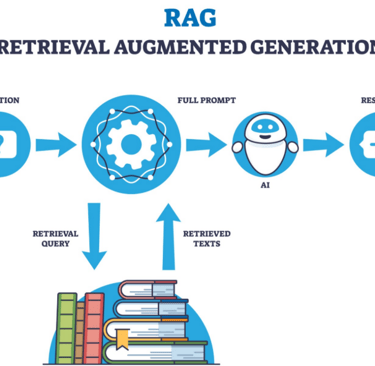
Engineered a Retrieval-Augmented Generation (RAG) system using LangChain and LangGraph to create a multi-agent conversational AI, enabling complex, multi-turn dialogues with real-time contextual knowledge retrieval.
Optimized data retrieval latency to under 500 ms across 500+ technical documents, ensuring high accuracy and providing reliable knowledge grounding for the AI agent.
Reduced model hallucination rates by 90% through advanced multi-turn conversation workflows designed in LangGraph, with production robustness ensured by LangSmith monitoring of over 1,000 trace events.
Tools and Technologies
Python
Git
GCP
FastAPI


Scikit-learn


SQL
Tensorflow


PyTorch
VS Code


Docker


LangChain
Pinecone

StreamLit
OpenAI
Let's talk.
Feel free to reach out to me for job opportunities, collaborations, or just to say hello!